智慧型與自主型機器人的應用前景相當可期,但如何確保系統安全運作、避免對人類造成傷害,仍是一大挑戰。環境感知正是安全運作的關鍵要素,它能確保偵測到所有與安全相關的物體,進一步使機器人能根據感知調整相應行為。
英特爾實驗室研究人員開發出一套專為移動式和固定式機器人設計的全新安全概念,在強化機器人操作能力的同時,也確保其運作安全。雖然智慧型與自主型機器人的應用前景相當可期,但如何確保系統安全運作、避免對人類造成傷害,仍是一大挑戰,尤其是在醫療、製造與零售等人機共享空間的工作環境中。環境感知正是安全運作的關鍵要素,它能確保偵測到所有與安全相關的物體,進一步使機器人能根據感知調整相應行為。
這項全新的安全概念採用3D距離感測器(例如RealSense深度攝影機)快速建立可重組的3D虛擬安全區,讓物體偵測更加穩定。由於此項技術無須依賴人工智慧(AI)的幫助,這些感知演算法能夠更容易通過安全認證,並在低功耗的嵌入式硬體上執行。研究團隊透過與RealSense的密切合作,確保這些全新的演算法能在下一代RealSense相機中獲得支援。
透過演算法應用,移動式機器人可以行駛在坡道上,並在遇到靜止障礙物時自動停止。這種安全行為已在2022年IEEE國際智慧交通系統會議(ITSC)上展示,且即使是使用目前最先進的2D安全感測器也難以達到相同效果。此外,固定式協作機器人(Cobot)周圍的安全區域可以根據任務和情境快速重新配置,這是傳統以光幕或物理屏障來區隔人機所無法辦到的,相關技術成果已在2023年IEEE/RSJ國際智慧機器人與系統會議(IROS)和2025年嵌入式電子與工業電腦應用展(Embedded World)上發表(圖1)。
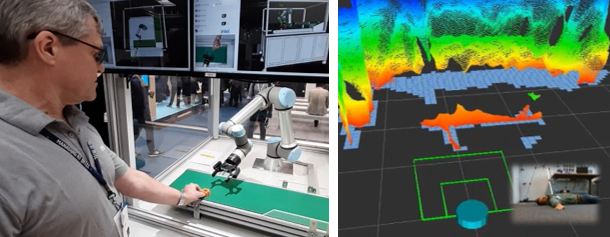 圖3 HistoDepth演算法能夠持續更新背景估計,同時辨識出動態量測資料。
圖3 HistoDepth演算法能夠持續更新背景估計,同時辨識出動態量測資料。
自動化移動式機器人的3D安全
移動機器人則通常使用2D距離感測器(例如LiDAR感測器)的單一掃描線來偵測環境,透過在離地一定高度測量周圍物體的距離,藉以確保安全行動。這種方法雖然低成本且技術成熟,但只有在平坦的地面上導航時才有良好的效果。然而,隨著移動機器人能力的提升,許多產業希望將它們部署在非平坦地形的環境中,例如設有坡道的卡車裝卸倉庫。此時如果要使用傳統方法,2D安全感測器需要安裝得夠高,以避免觸發障礙物偵測的安全警報。然而,這種方法也會導致低於設定高度的障礙物無法被偵測到,增加其風險。同理,使用以高度篩選的3D資料時,也會出現類似問題。
為因應此挑戰,英特爾實驗室的研究人員開發了一套全新的感知演算法,透過避免對3D感測器距離資料進行單純的高度過濾,藉以突破傳統方法的限制。該演算法透過將感測器資料區分為機器人可以移動的平坦表面資料點、機器人高度範圍內的高架物體(例如橋樑)資料點,以及關鍵目標物體的資料點。對於所有潛在的關鍵物體,演算法會進行篩選和分類,以評估機器人的當前速度是否可以在反應時間內停下。如果滿足此安全要求,機器人就可以依照預期移動,否則演算法將強制停止機器人的行動(圖2)。
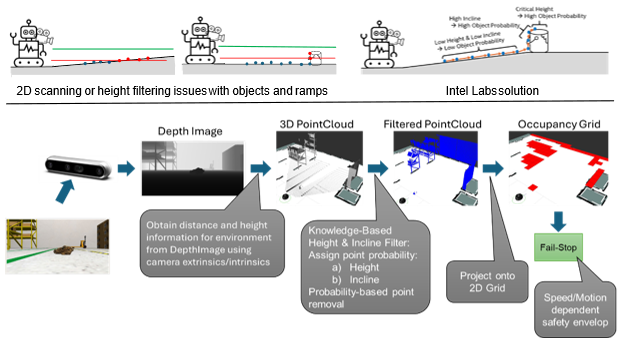 圖2 英特爾實驗室3D感知演算法的優勢在於能夠同時處理坡道和物體(上);英特爾實驗室針對移動機器人安全方法的不同處理步驟(下)。
圖2 英特爾實驗室3D感知演算法的優勢在於能夠同時處理坡道和物體(上);英特爾實驗室針對移動機器人安全方法的不同處理步驟(下)。
這項全新演算法還有另一項功能,能夠對距離感測器所取得的資料點進行地面移除,這在移動機器人進行路徑規劃時是一個非常常見的問題。英特爾機器人技術SDK提供了適用於自主移動機器人(AMR)的相應應用範例。
固定式工業協作機器人與 一般機器人的3D安全
固定式機器人通常配備具操作功能的機械手臂,並廣泛應用於各種工業領域。傳統上,這些機器人會透過圍欄或光幕進行物理隔離,以確保安全。然而,在協作機器人與人類共同工作的時代,物理隔離已不再可行,而是需要更新且更通用的安全方法。
為此,英特爾實驗室的研究人員開發了一種針對固定式機器人最佳化的新型感知方法。該方法使用來自3D距離感測器(例如RealSense深度攝影機或3D LiDAR感測器)的資料,並透過HistoDepth演算法進行統計採樣,穩定地將機器人的工作區域分割成靜態和動態元素(圖3)。
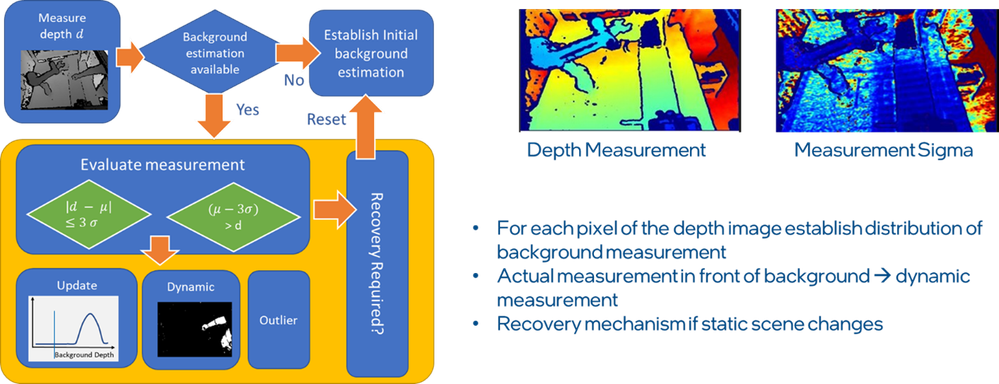 圖3 HistoDepth演算法能夠持續更新背景估計,同時辨識出動態量測資料。
圖3 HistoDepth演算法能夠持續更新背景估計,同時辨識出動態量測資料。
掌握3D位置後,即可對動態資料點進行分類和篩選。每當偵測到有動態物體接近時,機器人操作速度就會降低,甚至完全停止。這項技術的關鍵在於透過將機器人姿態資訊與感測器資料相關聯,將移動中的機器人手臂與環境中的其他動態物體區分開來。
HistoDepth演算法提供了自我調整機制,可以自動適應靜態環境的變化。內建持續監控的感測器資料品質也提供自我檢查能力,確保系統能夠識別感測器資料品質的下降。
其他感知演算法應用
這種感知演算法不僅限於單一感測器技術或單一固定式機器人使用。實際上,透過相同的方法,也能改善電梯或火車門的安全,避免物體仍在門框內時關閉。此外,還可以監控交通,使城市交叉路口更安全。這項在2023年ITSC上發表的LiDAR交通監控技術,提供了一種更智慧方式來管理日益增加的道路使用者數量,減緩交通壅堵並提高道路安全。
<本文作者:Cornelius Buerkle現為英特爾實驗室自主系統研究實驗室的研究員,專注於開發新型的AI感知系統,並推進關鍵性的安全技術。他的研究致力於建立穩健的即時環境理解,並將其轉化為可行的解決方案,以確保自主系統能在複雜的真實場景中安全且可靠地運作。>